PROJETOS CONCLUÍDOS ___________________________
MABIREH
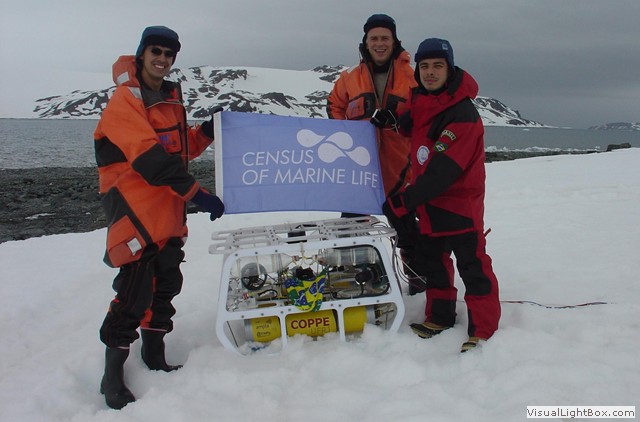
Sub-projeto: “Veículos submarinos de operação remota (ou robôs submarinos)”Este sub-projeto visa ao desenvolvimento de um veículo submarino de operação remota (ROV) ou robô submarino, para fazer o levantamento fotográfico e obter imagens de vídeo das formas de vida marinha encontradas no fundo da Baía do Almirantado, na Antártica. A utilização de um ROV pode permitir uma significativa melhoria na eficiência, assim como a redução de riscos e de custo das missões de exploração dos mares polares, em particular da Antártica.
O uso de robôs submarinos para exploração polar é ainda incipiente e essas missões, em sua maioria, ocorreram a partir do final dos anos noventa. Esta tecnologia não é ainda facilmente disponível e merece ser desenvolvida no Brasil para dar suporte aos interesses do país na Antártica.
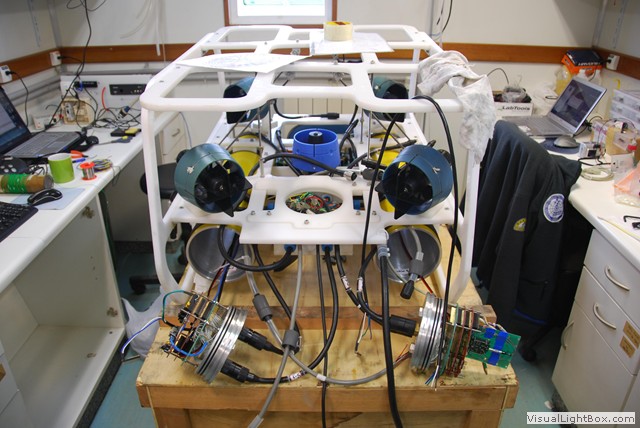
O ROV mostrado nas fotos 1 a 4, denominado LUMA, foi desenvolvido originalmente pelo grupo de pesquisa GSCAR, do Programa de Engenharia Elétrica da COPPE/UFRJ, para inspecionar túneis de adução de usinas hidrelétricas. Para adaptar este ROV para as condições de operação na Baía do Almirantado foram feitas diversa modificações tais como substituição da estrutura de alumínio por outra mais leve de polietileno, substituição da eletrônica por uma tolerante à baixas temperaturas e inclusão de vários instrumentos e sensores para auxiliar a sua navegação. Em particular, foi instalada uma nova câmera de vídeo de alta definição para garantir a qualidade das imagens obtidas dos organismos e facilitar a sua identificação. Para a expedição recentemente realizada em janeiro de 2009, o ROV recebeu um conjunto de baterias especiais para a sua alimentação, o que permitiu reduzir o peso do cabo umbilical e aumentar o seu comprimento.
Um resultado subjacente importante do presente projeto, é o conhecimento tácito e experiência que se espera adquirir durante a sua execução. Em outras palavras, trata-se de um projeto piloto para o desenvolvimento de versões mais avançadas de robôs dedicados a operações em regiões polares. Nessas versões avançadas, poderiam ser incorporados instrumentos de medição e de intervenção para levantamentos geográficos, geológicos, ambientais ou biológicos mais precisos e detalhados.
Vigência: 2008 a 2009
Financiador: CNPq (PROANTAR)
Responsáveis pelo sub-projeto: Liu Hsu e Ramon R. Costa





|